Data Collection
Simon Brown, the owner of Deep3D, is passionate about underwater photogrammetry. The process to create a scaled and geo referenced 3D model taps into so many areas of interest: SCUBA diving, underwater photography, data collection and management, embedded GPS and art.
Simon runs his own photogrammetry consultancy – www.deep3d.co.uk – and works alongside archaeologists and artists to create a new way of capturing, measuring and visualizing the underwater world.
Simon had previously tackled large underwater subjects and successfully managed to incorporate data from multiple dives and multiple contributors (example) into a single, scaled and referenced model. When Dr Jon Henderson first discussed scanning the SS Thistlegorm the challenges of scanning such a large subject was already understood. The sheer scale of this project was going to test established methods
father than anything that had gone before.
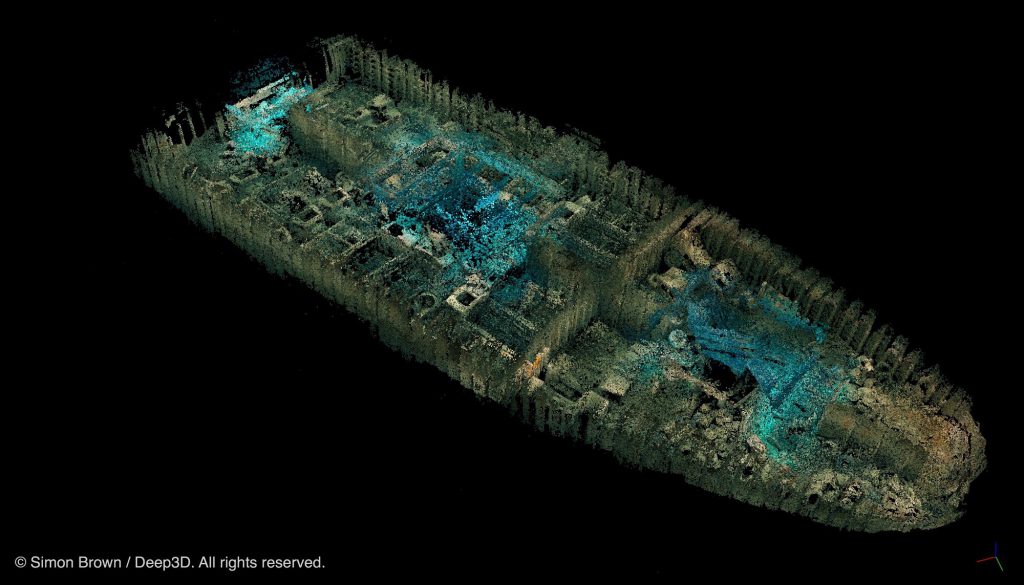
The scale and scope of the wreck was a little daunting, with the site extending over 140m long and sitting in 32m of water. The wreck can be subject to strong currents and variable underwater visibility. The explosion that sunk the ship scattered objects of interest over the seabed, including the two locomotives that
reside on the port and starboard sides of the wreck. To not include these areas of interest would have left the model lacking.
Equipment
The camera used was a Nikon D700 SLR body with a 16mm fisheye lens and protected from the salt water by a Subal housing. Lighting was provided by two Inon Z240 strobes. Of all the issues of gathering large amounts of data on a single dive battery life (of both camera and strobes) proved to be a limiting factor at
times.
The physical effort of scanning the wreck was eased by mounting the camera on an underwater scooter. The scooter mount allows the camera to shoot 3~4000 images in sequence, with the pace of the scooter set to ensure optimum image overlap.
Internal Survey
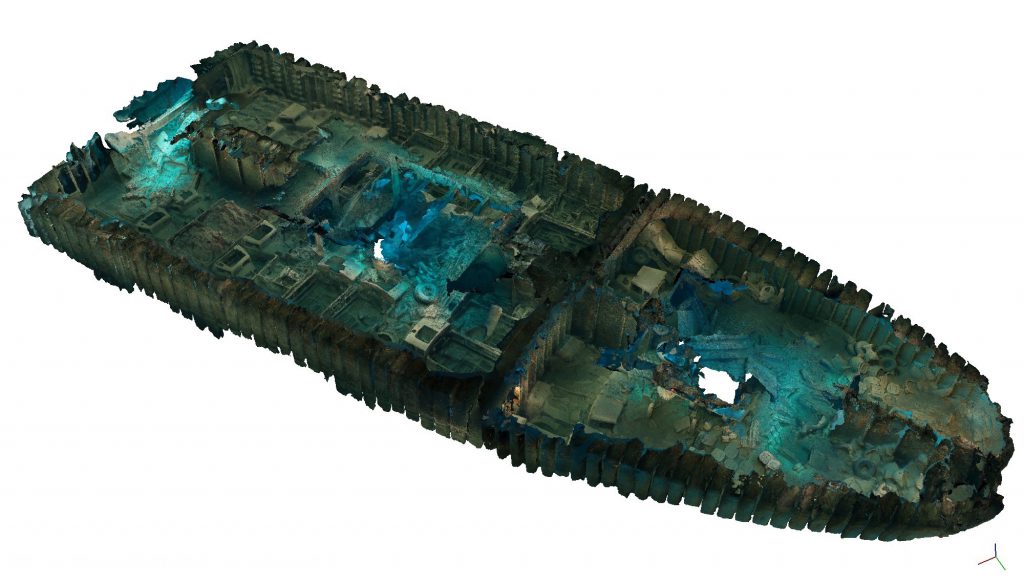
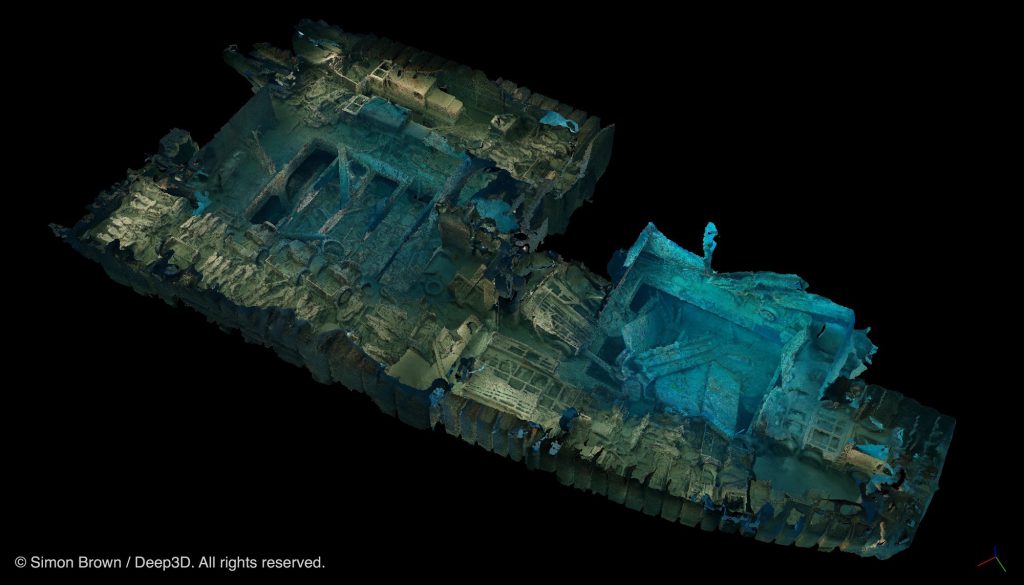
With the outside covered and a draft model built, surveying the holds and their cargo commenced. Particular attention was paid to the joining points between the decks, to ensure the separate scans would align later. The remains of the lorries, motorbikes and aircraft parts, all packed into the cramped space of the holds, made scanning challenging. A frequent issue was other divers and their bubbles appearing in the images – the wreck is very popular – and having moving objects in the images can cause alignment issues. Scanning the cargo hold decks took a total of 5 dives to complete the coverage.
In addition to the images, physical measurements of the wreck and key point GPS data were gathered. This enabling the model to be built with location & orientation understood and the subsequent outputs to be measured with confidence.